{kind=link}
A collaboration between NVIDIA and tutorial researchers is prepping robots for surgical procedure.
ORBIT-Surgical — developed by researchers from the College of Toronto, UC Berkeley, ETH Zurich, Georgia Tech and NVIDIA — is a simulation framework to coach robots that would increase the talents of surgical groups whereas lowering surgeons’ cognitive load.
It helps greater than a dozen maneuvers impressed by the coaching curriculum for laparoscopic procedures, aka minimally invasive surgical procedure, akin to greedy small objects like needles, passing them from one arm to a different and inserting them with excessive precision.
The physics-based framework was constructed utilizing NVIDIA Isaac Sim, a robotics simulation platform for designing, coaching and testing AI-based robots. The researchers educated reinforcement studying and imitation studying algorithms on NVIDIA GPUs and used NVIDIA Omniverse, a platform for growing and deploying superior 3D purposes and pipelines based mostly on Common Scene Description (OpenUSD), to allow photorealistic rendering.
Utilizing the community-supported da Vinci Analysis Equipment, supplied by the Intuitive Basis, a nonprofit supported by robotic surgical procedure chief Intuitive Surgical, the ORBIT-Surgical analysis group demonstrated how coaching a digital twin in simulation transfers to a bodily robotic in a lab surroundings within the video under.
ORBIT-Surgical shall be introduced Thursday at ICRA, the IEEE Worldwide Convention on Robotics and Automation, going down this week in Yokohama, Japan. The open-source code bundle is now accessible on GitHub.
A Sew in AI Saves 9
ORBIT-Surgical relies on Isaac Orbit, a modular framework for robotic studying constructed on Isaac Sim. Orbit contains help for numerous libraries for reinforcement studying and imitation studying, the place AI brokers are educated to imitate ground-truth skilled examples.
The surgical framework allows builders to coach robots just like the da Vinci Analysis Equipment robotic, or dVRK, to control each inflexible and smooth objects utilizing reinforcement studying and imitation studying frameworks operating on NVIDIA RTX GPUs.
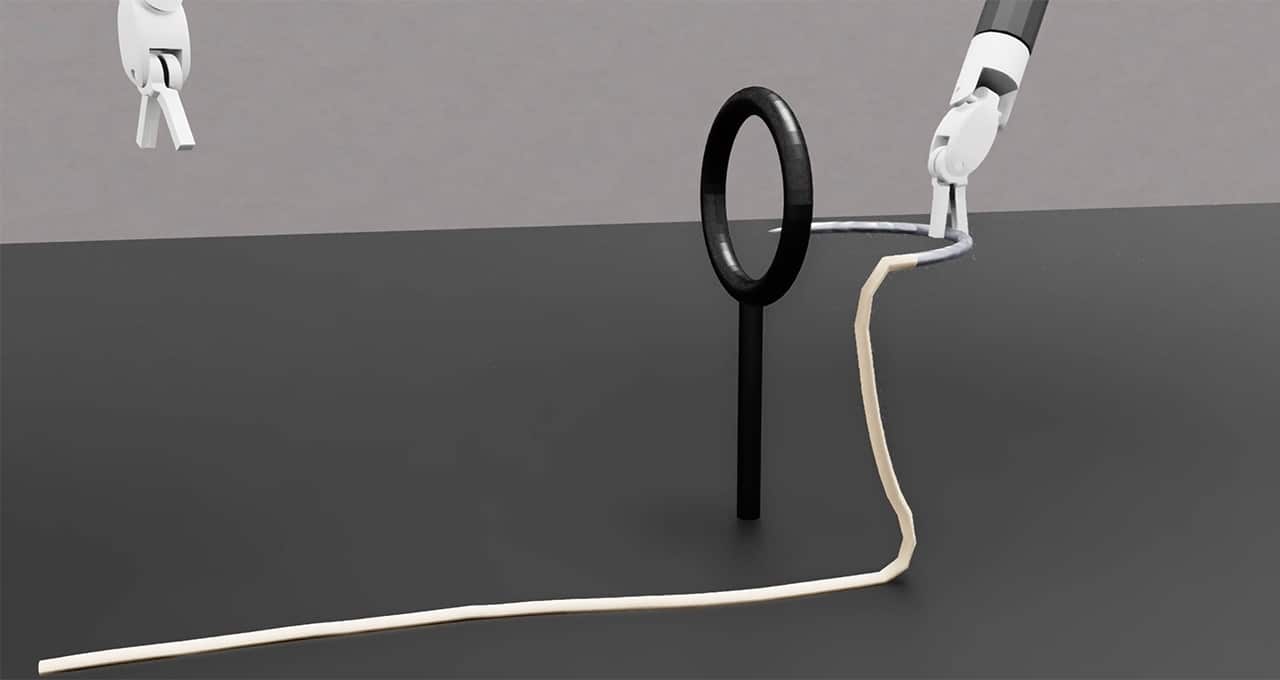
ORBIT-Surgical introduces greater than a dozen benchmark duties for surgical coaching, together with one-handed duties akin to choosing up a bit of gauze, inserting a shunt right into a blood vessel or lifting a suture needle to a particular place. It additionally contains two-handed duties, like handing a needle from one arm to a different, passing a threaded needle by a hoop pole and reaching two arms to particular positions whereas avoiding obstacles.
Certainly one of ORBIT-Surgical’s benchmark assessments is inserting a shunt — proven on left with a real-world robotic and on proper in simulation.
By growing a surgical simulator that takes benefit of GPU acceleration and parallelization, the group is ready to increase robotic studying pace by an order of magnitude in comparison with present surgical frameworks. They discovered that the robotic digital twin could possibly be educated to finish duties like inserting a shunt and lifting a suture needle in underneath two hours on a single NVIDIA RTX GPU.
With the visible realism enabled by rendering in Omniverse, ORBIT-Surgical additionally permits researchers to generate high-fidelity artificial information, which might assist prepare AI fashions for notion duties akin to segmenting surgical instruments in real-world movies captured within the working room.
A proof of idea by the group confirmed that combining simulation and actual information considerably improved the accuracy of an AI mannequin to phase surgical needles from photographs — serving to cut back the necessity for big, costly real-world datasets for coaching such fashions.
Learn the paper behind ORBIT-Surgical, and study extra about NVIDIA-authored papers at ICRA.